テンソル化による進化的多目的最適化とGPUアクセラレーションの橋渡し
Zhenyu Liang, Hao Li, Naiwei Yu, Kebin Sun, and Ran Cheng, IEEEシニアメンバー
エンジニアリング設計やエネルギー管理などの分野において、複雑な最適化ソリューションへの需要が高まり続ける中、進化的多目的最適化(EMO)アルゴリズムは、多目的問題を解決する強力な能力により広く注目を集めています。しかし、最適化タスクの規模と複雑さが増すにつれて、従来のCPUベースのEMOアルゴリズムは重大なパフォーマンスのボトルネックに直面しています。
この制限に対処するため、EvoXチームはテンソル化手法を用いてGPU上でEMOアルゴリズムを並列化することを提案しました。この手法を活用し、彼らはいくつかのGPUアクセラレーション対応EMOアルゴリズムの設計と実装に成功しました。さらに、チームはBrax物理エンジン上に構築された多目的ロボット制御のためのベンチマークスイートである 「MoRobtrol」 を開発し、GPUアクセラレーションされたEMOアルゴリズムの性能を体系的に評価することを目指しました。
これらの研究成果に基づき、EvoXチームは高性能なGPUアクセラレーション対応EMOアルゴリズムライブラリである EvoMO をリリースしました。対応するソースコードはGitHubで公開されています: https://github.com/EMl-Group/evomo
テンソル化手法
計算最適化の分野において、テンソルとは、スカラー、ベクトル、行列、および高階データを表現できる多次元配列データ構造を指します。テンソル化とは、アルゴリズム内のデータ構造と操作をテンソル形式に変換するプロセスであり、これによりアルゴリズムがGPUの並列計算能力を最大限に活用できるようになります。
EMOアルゴリズムでは、すべての主要なデータ構造をテンソル化された形式で表現できます。集団内の個体は解テンソル X で表すことができ、各行ベクトルが1つの個体に対応します。目的関数値は目的テンソル F を形成します。さらに、参照ベクトルや重みベクトルなどの補助データ構造も、それぞれテンソル R および W として表現できます。この統一されたテンソル表現により、表現レベルでの集団レベルの操作が可能となり、大規模な並列計算のための強固な基盤が築かれます。
EMOアルゴリズムの操作のテンソル化は、計算効率を向上させるために不可欠であり、基本テンソル操作と制御フローのテンソル化の2つの層に分けることができます。基本テンソル操作は、表Iに詳述されているように、EMOアルゴリズムのテンソル化実装の中核を構成します。
表I: 基本的なテンソル操作
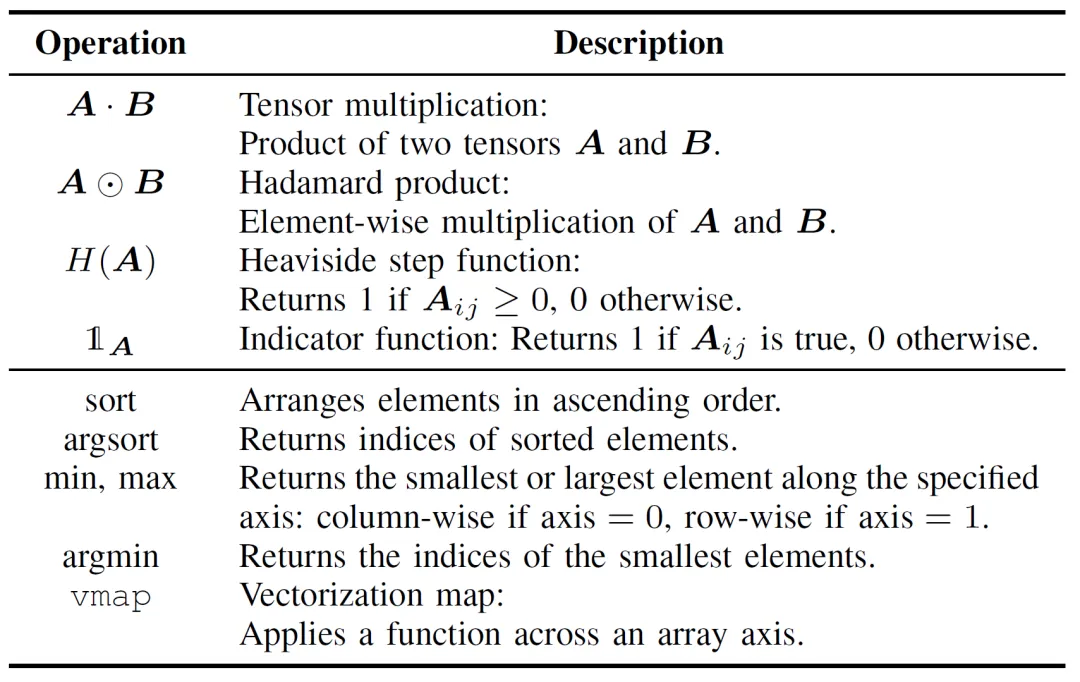
制御フローのテンソル化は、従来のループや条件分岐ロジックを、並列化可能なテンソル操作に置き換えます。例えば、for/whileループは、ブロードキャスティングメカニズムや vmap などの高階関数を使用してバッチ操作に変換できます。同様に、if-else条件分岐はマスキング技術に置き換えることができ、論理条件をブールテンソルとしてエンコードすることで、異なる計算パス間の柔軟な切り替えが可能になります。
従来のEMOアルゴリズムの実装と比較して、テンソル化アプローチには大きな利点があります。第一に、従来の手法が2次元の行列演算に制限されがちであるのに対し、多次元データを自然に扱えるため、より高い柔軟性を提供します。第二に、テンソル化は並列実行を通じて計算効率を大幅に向上させ、明示的なループや条件分岐に伴うオーバーヘッドを回避します。最後に、コード構造が簡素化され、より簡潔で保守性の高いプログラムになります。
例えば図1に示すように、パレート優越判定の従来の実装は、要素ごとの比較を行うために入れ子になったループに依存しています。対照的に、テンソル化されたバージョンは、ブロードキャスティングとマスキング操作を通じて同じ機能を実現し、並列評価を可能にします。これにより、コードの複雑さが軽減されるだけでなく、実行時のパフォーマンスも劇的に向上します。

図1: パレート優越判定における従来の実装とテンソルベースの実装の比較。
より深い視点から見ると、GPUは多数の並列コアを持ち、その単一命令複数スレッド(SIMT)アーキテクチャがテンソル計算、特に行列演算に優れているため、テンソル化はGPUアクセラレーションに非常に適しています。NVIDIAのTensor Coresなどの専用ハードウェアは、テンソル演算のスループットをさらに向上させます。一般に、高い並列性を持ち、独立した計算タスクを含み、条件分岐が最小限であるアルゴリズムは、テンソル化に適しています。MOEA/Dのように順序依存性を伴うアルゴリズムの場合、その固有の構造が直接的なテンソル化への課題となります。しかし、構造的なリファクタリングと重要な計算の分離(デカップリング)を通じて、効果的な並列アクセラレーションを実現することは依然として可能です。
アルゴリズムのテンソル化の適用例
テンソル化表現手法に基づき、EvoXチームは3つの古典的なEMOアルゴリズムのテンソル化バージョンを設計・実装しました。優越ベースのNSGA-III、分解ベースのMOEA/D、そして指標ベースのHypEです。以下のセクションでは、MOEA/Dを例として詳細に説明します。NSGA-IIIとHypEのテンソル化実装については、参照論文をご覧ください。
図2に示すように、従来のMOEA/Dは多目的問題を複数の部分問題に分解し、それぞれを独立して最適化します。このアルゴリズムは、交叉と突然変異、適応度評価、理想点の更新、近傍の更新という4つの主要なステップで構成されています。これらのステップは、単一のループ内で各個体に対して順次実行されます。この順次処理は、各個体がすべてのステップを順番に完了する必要があるため、大規模な集団を扱う際に多大な計算オーバーヘッドをもたらし、GPUアクセラレーションの潜在的な利点を制限します。特に、近傍の更新は個体間の相互作用に依存するため、並列化をさらに複雑にします。

図2: MOEA/Dの擬似コード
従来のMOEA/Dにおける順序依存性の問題に対処するため、チームは環境選択の内部ループにテンソル化表現手法を導入しました。交叉と突然変異、適応度評価、理想点の更新、近傍の更新を分離することで、これらのコンポーネントを独立した操作として扱います。これにより、すべての個体の並列処理が可能になり、TensorMOEA/Dと呼ばれるテンソル化されたMOEA/Dアルゴリズムが構築されました。このアルゴリズムでは、環境選択は主に2つの段階、すなわち比較と集団の更新、およびエリート解の選択に分けられます。これら2つの段階は、主に2回の vmap 操作の適用を通じてテンソル化されます。詳細なプロセスを図3に示します。
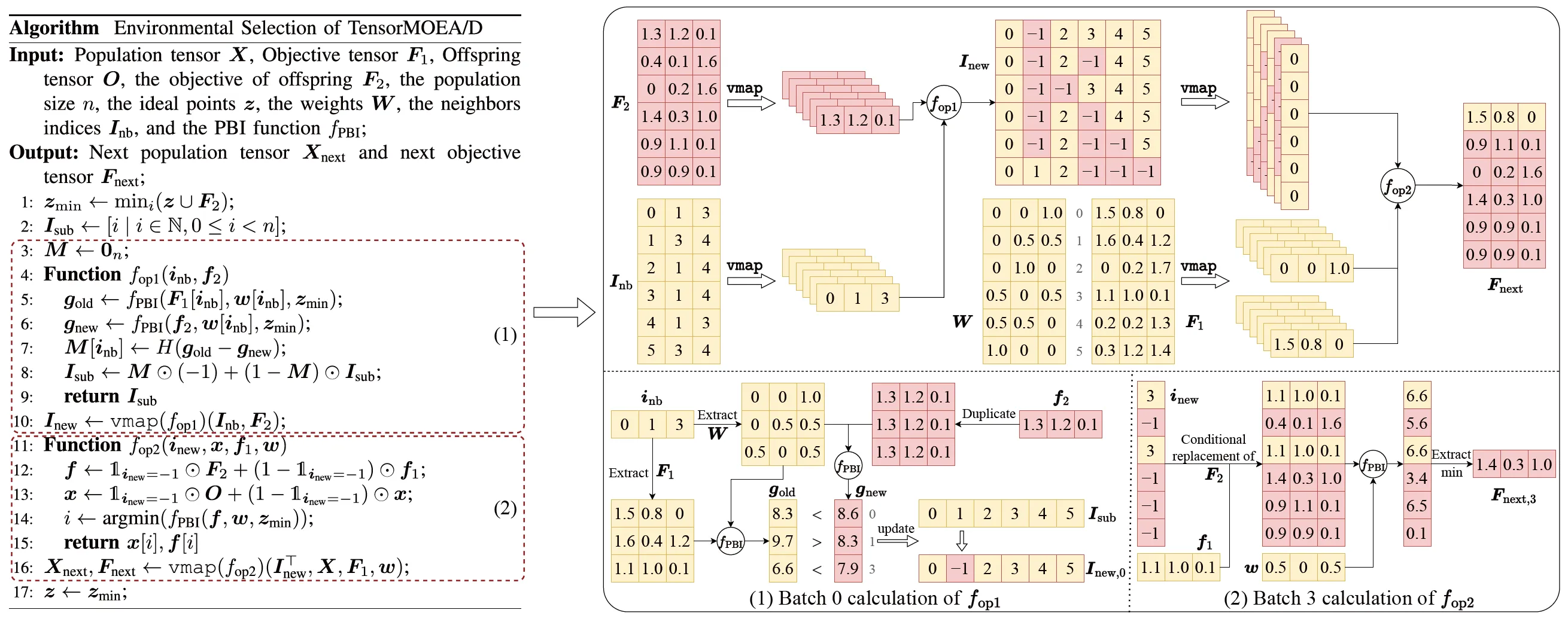

図3: TensorMOEA/Dアルゴリズムにおける環境選択の概要。 左: アルゴリズムの擬似コード。 右: モジュール(1)とモジュール(2)のテンソルデータフロー。右図の上部はモジュール(1)と(2)の全体的なテンソルデータフローを示し、下部はバッチ計算のテンソルデータフローを示しており、左側がモジュール(1)、右側がモジュール(2)です。
EMOアルゴリズムにおけるテンソル化の価値をより包括的に理解するために、3つの観点から要約できます。第一に、テンソル化は数式から効率的なコードへの直接的な変換を可能にし、アルゴリズムの設計と実装の間のギャップを縮めます。例えば、図4は、テンソル化された非劣ソートの手順が、擬似コードからPythonコードへといかに直接的に翻訳できるかを示しています。第二に、テンソル化は集団レベルの操作を単一のテンソル表現に統合することで、コード構造を大幅に簡素化します。これにより、ループや条件文への依存が減り、コードの可読性と保守性が向上します。第三に、テンソル化はアルゴリズムの再現性を高めます。その構造化された表現は、比較テストと結果の一貫した再現を容易にします。

図4: テンソル化された非劣ソートの擬似コード(左)からPythonコード(右)へのシームレスな変換。
性能実証
GPUアクセラレーションされた多目的最適化アルゴリズムの性能を評価するために、EvoXチームは、計算の加速、数値最適化性能、および多目的ロボット制御タスクにおける有効性に焦点を当てた3つのカテゴリの実験を体系的に実施しました。
計算アクセラレーション性能:
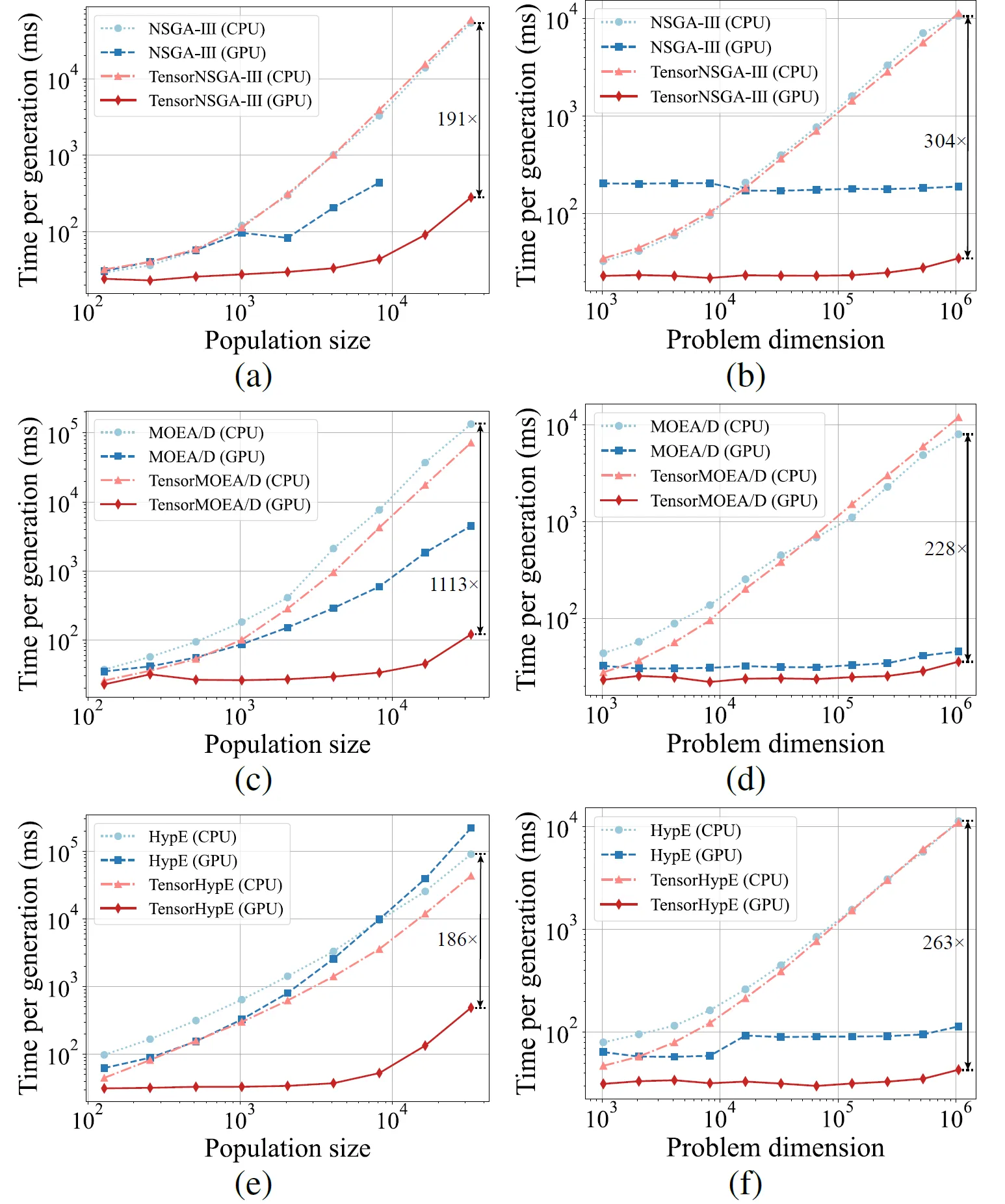
図5: 様々な集団サイズと問題次元における、CPUおよびGPUプラットフォーム上でのNSGA-III、MOEA/D、HypEとそのテンソル化版の加速性能の比較。
実験結果は、TensorNSGA-III、TensorMOEA/D、およびTensorHypEが、非テンソル化のCPUベースの対応物と比較して、GPU上で大幅に高い実行速度を達成することを示しています。集団サイズと問題の次元が増加するにつれて、観測された最大速度向上は 1113倍 に達します。テンソル化されたアルゴリズムは、大規模な計算タスクを処理する際に優れたスケーラビリティと安定性を示しており、実行時間の増加はわずかでありながら、一貫して高いパフォーマンスを維持しています。これらの発見は、多目的最適化におけるGPUアクセラレーションに対するテンソル化の大きな利点を強調しています。
LSMOPテストスイートでの性能:
表II: LSMOP1〜LSMOP9における非テンソル化およびテンソル化EMOアルゴリズムのIGDと実行時間(秒)の統計結果(平均と標準偏差)。すべての実験はRTX 4090 GPU上で行われ、最良の結果は強調表示されています。
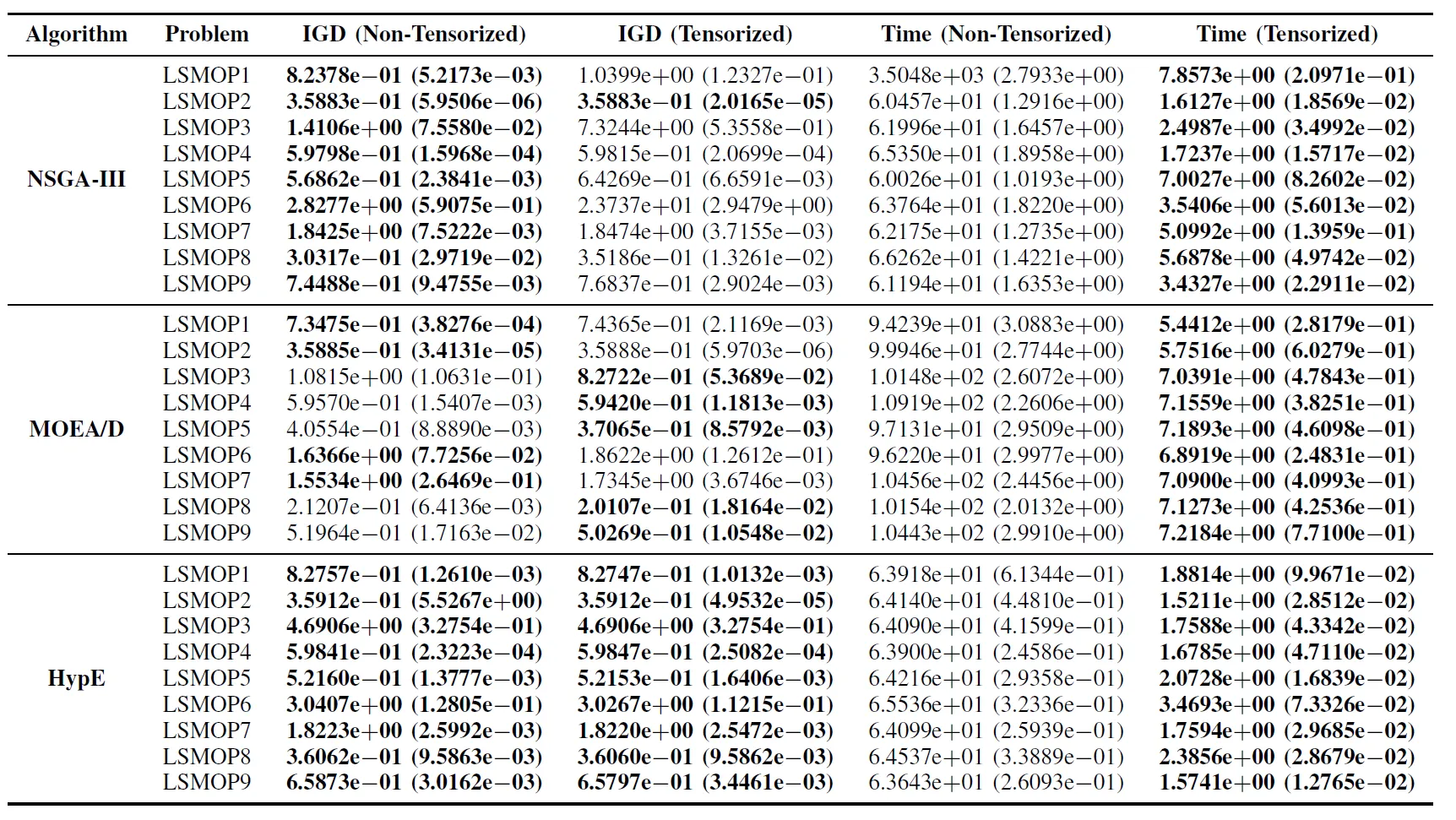
実験結果は、テンソル化表現に基づくGPUアクセラレーション対応EMOアルゴリズムが、計算効率を大幅に向上させつつ、元のアルゴリズムの最適化精度を維持し、場合によってはそれを上回ることを示しています。
多目的ロボット制御タスク:
GPUアクセラレーション対応EMOアルゴリズムの実用的な性能を包括的に評価するために、チームは多目的ロボット制御のためのMoRobtrolというベンチマークスイートを開発しました。このスイートに含まれるタスクは表IIIにリストされています。
表III: 提案されたMoRobtrolベンチマークテストスイートにおける多目的ロボット制御問題の概要
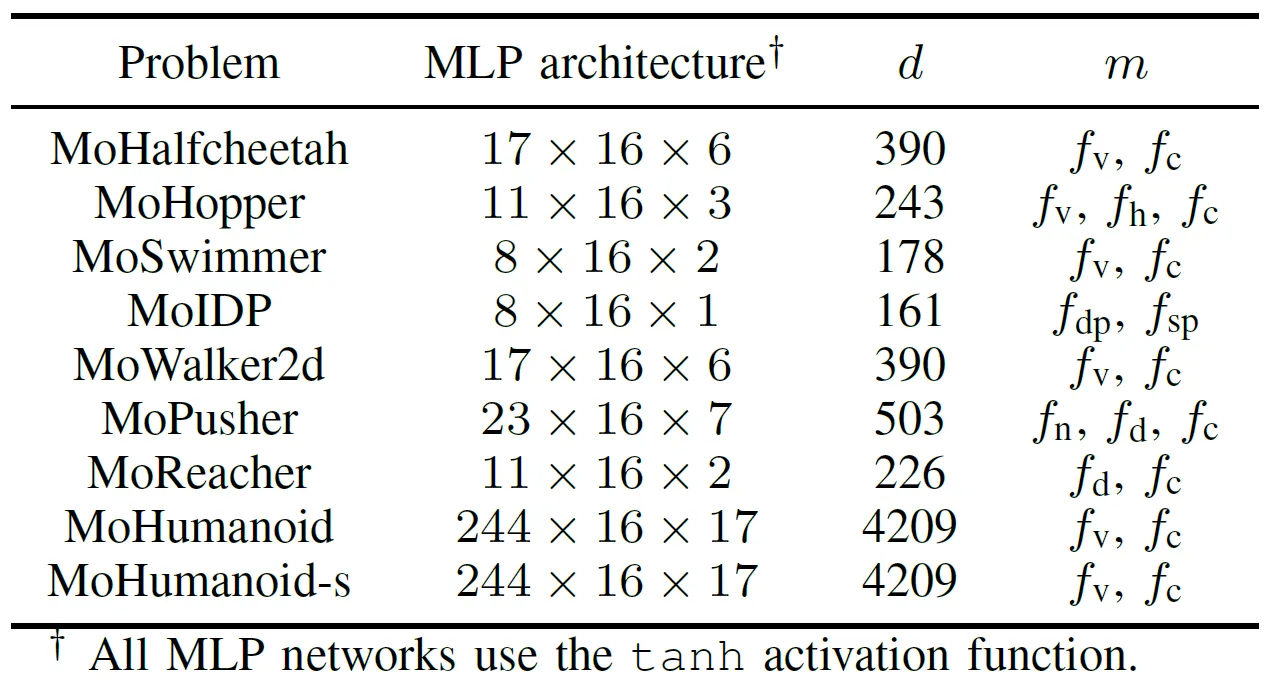
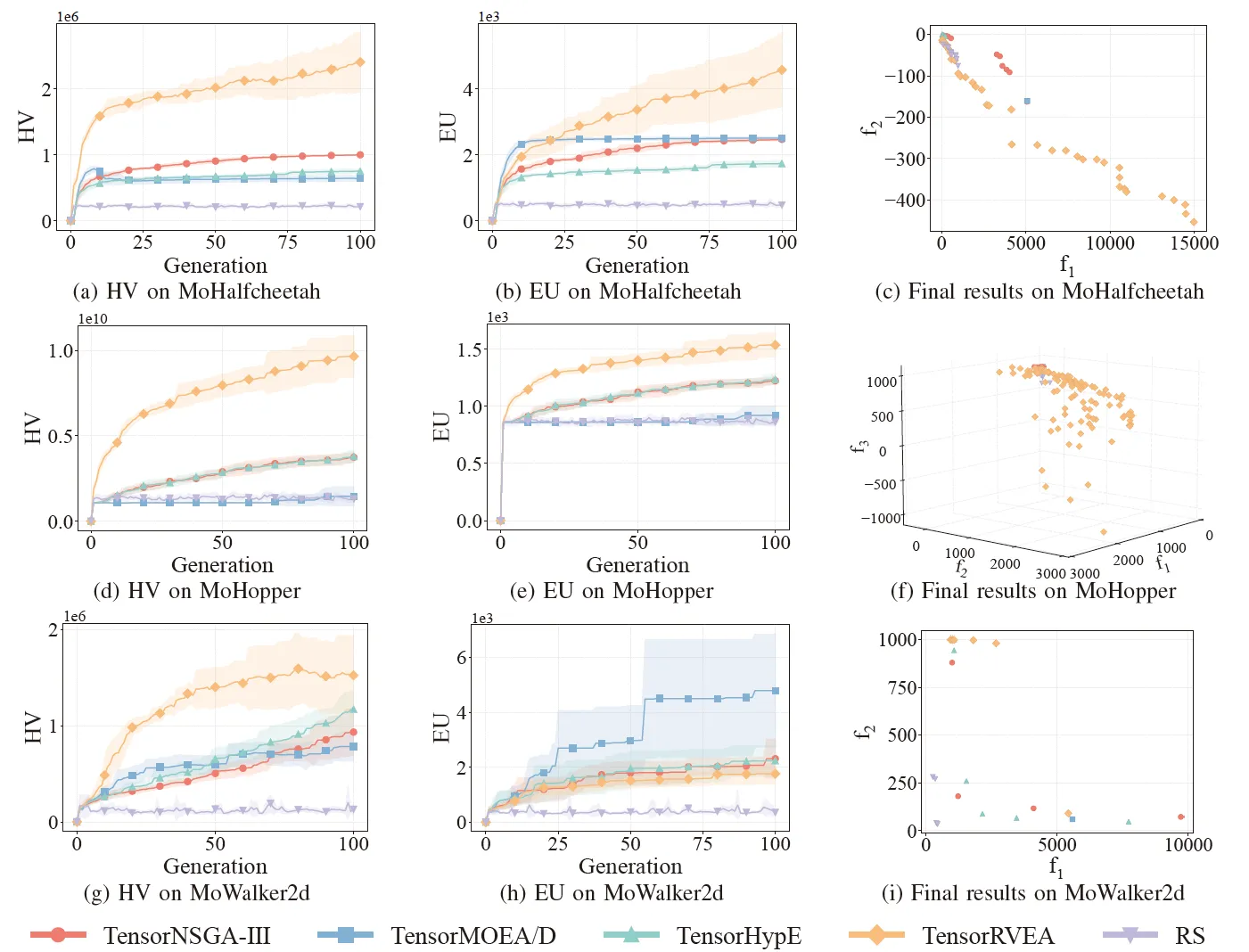
図6: 様々な問題(MoHalfcheetah (390D)、MoHopper (243D)、MoWalker2d (390D))におけるTensorNSGA-III、TensorMOEA/D、TensorHypE、TensorRVEA、およびランダムサーチ(RS)の比較性能(HV、EU、および最終結果の可視化)。注: すべての指標において、値が高いほど性能が良いことを示します。
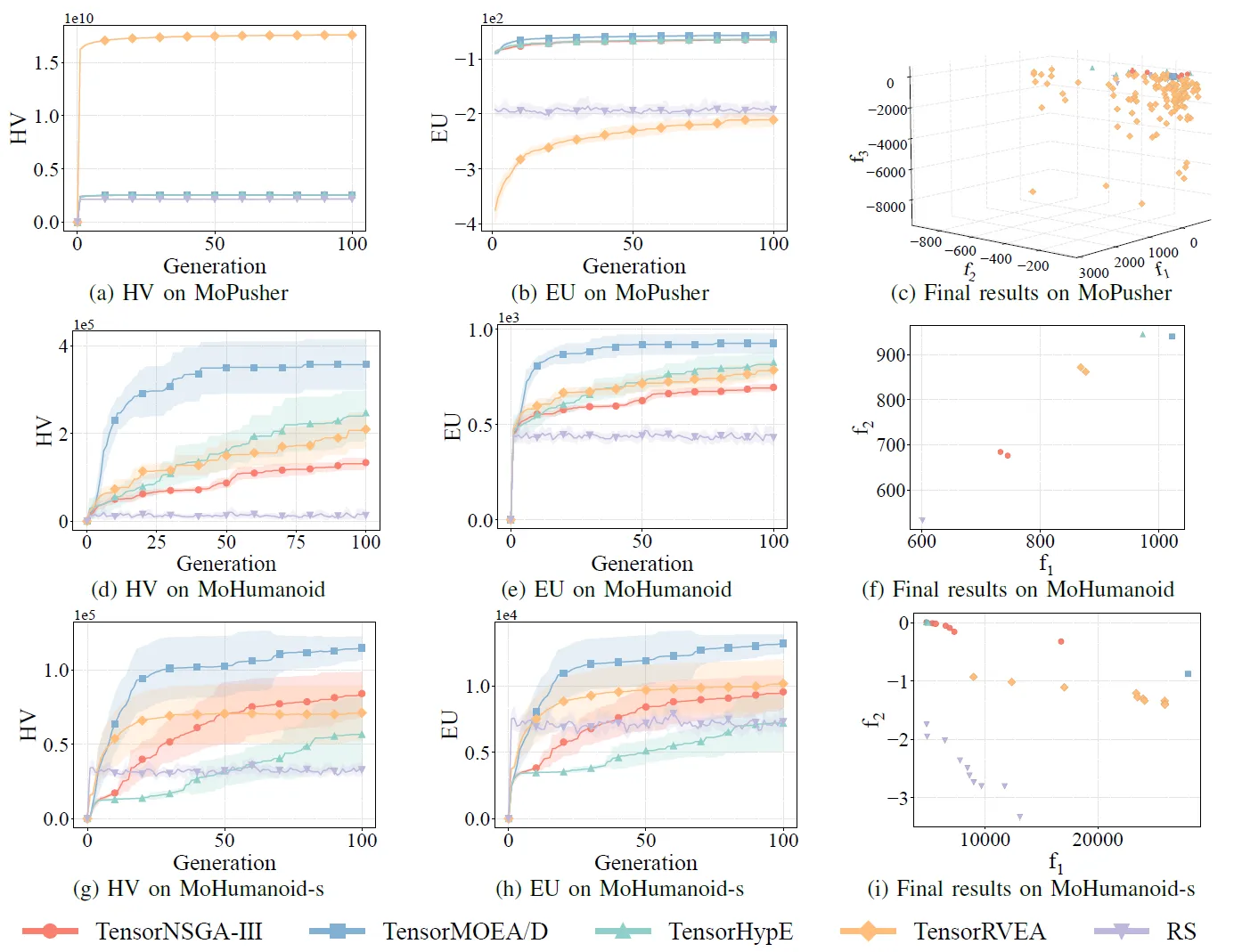
図7: 様々な問題(MoPusher (503D)、MoHumanoid (4209D)、MoHumanoid-s (4209D))におけるTensorNSGA-III、TensorMOEA/D、TensorHypE、TensorRVEA、およびランダムサーチ(RS)の比較性能(HV、EU、および最終結果の可視化)。注: すべての指標において、値が高いほど性能が良いことを示します。
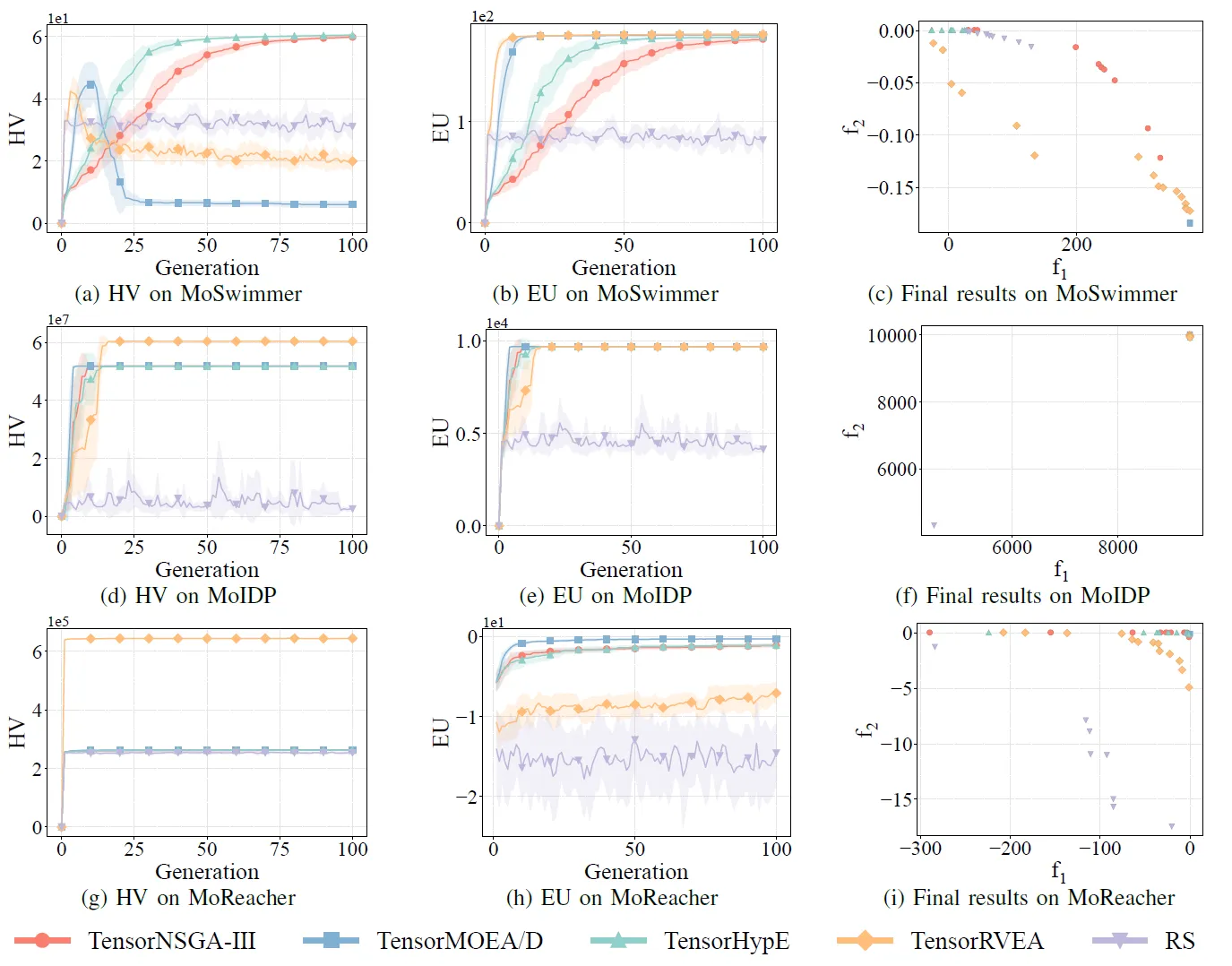
図8: 様々な問題(MoSwimmer (178D)、MoIDP (161D)、MoReacher (226D))におけるTensorNSGA-III、TensorMOEA/D、TensorHypE、TensorRVEA、およびランダムサーチ(RS)の比較性能(HV、EU、および最終結果の可視化)。注: すべての指標において、値が高いほど性能が良いことを示します。
実験では、MoRobtrolベンチマーク内でTensorNSGA-III、TensorMOEA/D、TensorHypE、TensorRVEA、およびランダムサーチ(RS)の性能を比較しました。結果として、TensorRVEAが全体的に最高のパフォーマンスを達成し、最も高いHV値を獲得するとともに、複数の環境で良好な解の多様性を示しました。TensorMOEA/Dは大規模なタスクにおいて強力な適応性を示し、特に解の選好整合性において優れていました。TensorNSGA-IIIとTensorHypEは同様のパフォーマンスを示し、いくつかのタスクで競争力がありました。全体として、テンソル化された分解ベースのアルゴリズムは、大規模で複雑な問題を解決する上で優れた利点を示しました。
結論と今後の展望
本研究では、計算効率とスケーラビリティの観点から、従来のCPUベースのEMOアルゴリズムの限界に対処するためのテンソル化表現手法を提案しました。このアプローチは、NSGA-III、MOEA/D、HypEなどのいくつかの代表的なアルゴリズムに適用され、解の品質を維持しながらGPU上で大幅な性能向上を達成しました。その実用性を検証するために、チームは物理シミュレーション環境におけるロボット制御タスクを多目的最適化問題として再定式化した、多目的ロボット制御ベンチマークスイートであるMoRobtrolも開発しました。結果は、身体性知能(Embodied Intelligence)のような計算集約的なシナリオにおけるテンソル化アルゴリズムの可能性を示しています。テンソル化手法はアルゴリズムの効率を大幅に向上させましたが、さらなる強化の余地は残されています。今後の方向性としては、非劣ソートなどのコア演算子の改善、マルチGPUシステム向けの新しいテンソル化操作の設計、および大規模最適化問題での性能をさらに高めるための大規模データとディープラーニング技術の統合が含まれます。
オープンソースコード / コミュニティリソース
論文:
https://arxiv.org/abs/2503.20286
GitHub:
https://github.com/EMI-Group/evomo
上流プロジェクト (EvoX):
https://github.com/EMI-Group/evox
QQグループ: 297969717
EvoMOはEvoXフレームワーク上に構築されています。EvoXについてさらに詳しく知りたい方は、私たちのWeChat公式アカウントで公開されているEvoX 1.0に関する公式記事をぜひご覧ください。
